Geometrisch exakte Balkentheorien
3 SWS, 5 ECTS, Wintersemester
Inhalt
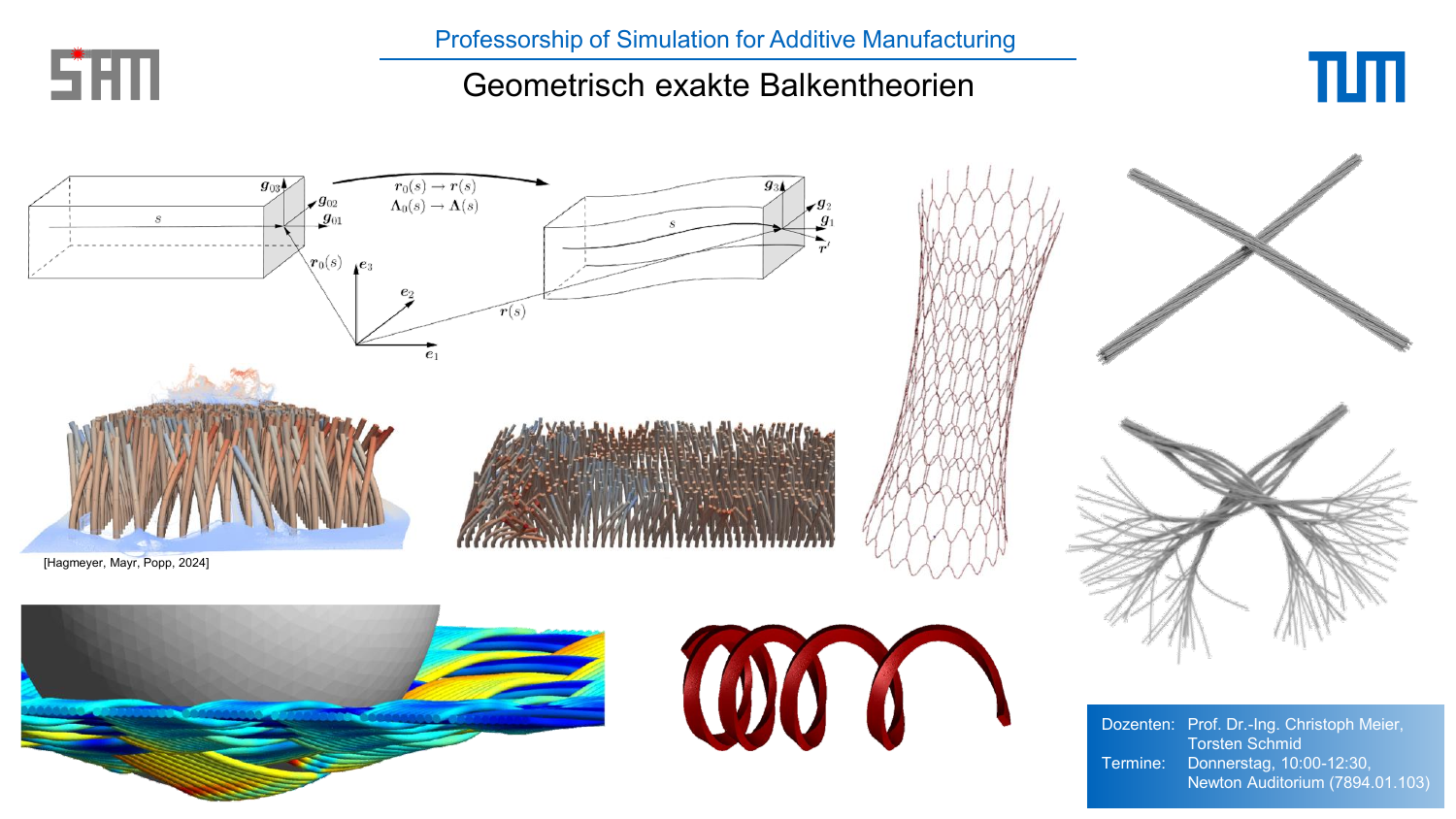
Der Fokus der Vorlesung liegt auf geometrisch exakten Balkentheorien als Beispiel für nichtlineare Modelle der Strukturmechanik. Schlanke balken- oder faserartige Komponenten sind essentielle Bestandteile mechanischer Systeme in zahllosen Anwendungsfeldern und wissenschaftlichen Disziplinen. Beispiele sind hochfeste Seile und Gewebe, faserverstärkte Verbundwerkstoffe oder synthetische Polymerwerkstoffe. Auf gänzlich anderen Zeit- und Längenskalen sind solche Komponenten etwa relevant zur Analyse des Supercoiling-Prozesses von DNA-Strängen, der Eigenschaften von Carbon Nanotubes oder des Cytoskeletts biologischer Zellen. Letzteres stellt ein biopolymeres Netzwerk aus schlanken Filamenten dar, welches die Mechanik von Zellen entscheidend beeinflusst. Oftmals können diese schlanken Komponenten mittels geometrisch (vollständig) nichtlinearen Balkenmodellen beschrieben werden. In vielen Fällen spielt auch die Interaktion zwischen diesen balken- oder faserartigen Komponenten (z.B. aufgrund mechanischem Kontakts oder intermolekularer Potentiale) eine wichtige Rolle.
Basierend auf einer fundamentalen kinematischen Annahme können geometrisch exakte Balkentheorien sowohl große Rotationen als auch große Dehnungen konsistent, d.h. ohne weitere Approximationen, abbilden. Insbesondere werden in diesem Zusammenhang die geometrisch exakte Simo-Reissner Balkentheorie (kinematische Annahme: Balkenquerschnitte bleiben eben; nichtlineares Gegenstück zur linearen Timoshenko Balkentheorie) sowie die geometrisch exakte Kirchhoff-Love Balkentheorie (kinematische Annahme: Balkenquerschnitte bleiben eben und senkrecht zur Mittellinie; nichtlineares Gegenstück zur linearen Euler-Bernoulli Balkentheorie) sowie deren Interpretation als ein 1D Cosserat-Kontinuum, d.h. eine Kontinuumstheorie mit je drei translatorischen und drei rotatorischen Freiheitgraden, eingeführt.
Da das Vorhandensein großer Rotationen ein entscheidendes Merkmal vollständig nichtlinearer Strukturtheorien ist, wird eingangs die Theorie großer Rotationen (insbesondere die Theorie der speziellen orthogonalen Gruppe SO(3)) eingeführt. Basierend auf diesen Grundlagen, wird anschließend die geometrisch exakte Balkentheorie als eine nichtlineare Cosserat-Kontinuumstheorie bestehend aus (jeweils translatorischen und rotatorischen) Verzerrungsmaßen, Spannungsresultierenden, Konstitutivbeziehungen und mechanischen Gleichgewichtsbedingungen (jeweils in räumlicher oder materialer Form) postuliert. Darüber hinaus wird gezeigt, wie die geometrisch exakte Balkentheorie aus den Gleichungen der nichtlinearen Kontinuumsmechanik unter Einbeziehung der fundamentalen kinematischen Annahme abgeleitet werden kann. Zu diesem Zweck wird auch eine Kurzzusammenfassung der nichtlinearen Kontinuumsmechanik von Festkörpern (3D Boltzmann-Kontinuum) präsentiert, welche u.a. auch die strukturellen Ähnlichkeiten zur geometrisch nichtlinearen Balkentheorie (1D Cosserat-Kontinuum) veranschaulicht.
Schließlich gibt die Vorlesung einen Überblick zu Modellierungsansätzen für die mechanische Kontaktinteraktion zwischen balken- oder faserartigen Strukturen (z.B. in Seilen oder Geweben) und für die Einbettung solcher Strukturen in ein 3D Boltzmann-Kontinuum. Solche Ansätze können beispielsweise zur Modellierung faserverstärkter Verbundwerkstoffe angewandt werden. Abschließend werden relevante numerische Diskretisierungs- und Lösungsverfahren (insbesondere Diskretisierungsansätze basierend auf der Finite Elemente Methode - FEM) präsentiert. Letztere werden von den Studierenden im Rahmen eines Lab-Termins mit Hilfe einer am Lehrstuhl entwickelten FEM-Software angewandt, um ausgewählte Problemstellungen der vollständig nichtlinearen Balkenmechanik zu analysieren.