Contact Dynamics: Contact Formulations
Alexander Popp, Philipp Farah, Michael Hiermeier and Alexander Seitz
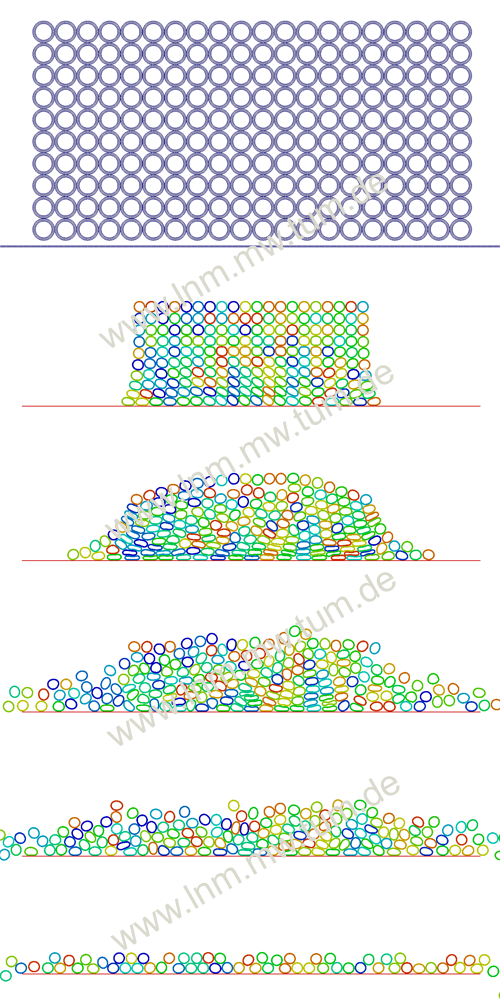
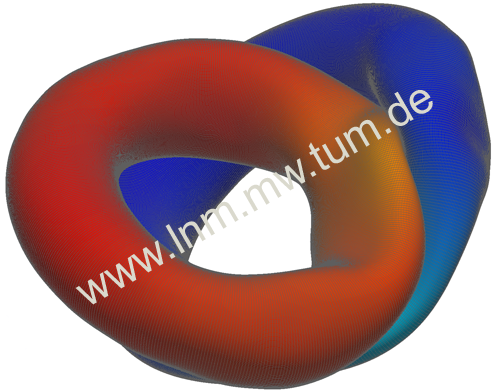
Our method development in the field of computational contact dynamics focuses on efficient finite element discretizations for fully nonlinear problems (finite deformations, nonlinear material behavior, friction) and non-matching meshes / non-conforming interfaces. Mortar methods, which originate from domain decomposition, have proven to serve as an ideal computational framework, as they allow for a variationally consistent treatment of contact interaction. Using so-called dual spaces for the Lagrange multiplier interpolation pairs the superior robustness of mortar methods with a significant increase of computational efficiency, while at the same time preserving optimal spatial convergence and other important properties of mortar methods. The simplification is mainly achieved by chosing dual shape functions based on a so-called biorthogonality condition, which avoid the necessity of solving a mass matrix system for the interface coupling problem.
The question of constraint enforcement is addressed with active set strategies interpreted as so-called semi-smooth Newton methods, which treat all nonlinearities (kinematics, material, contact, friction) within one single nonlinear iteration scheme. In contrast to the most commonly applied constraint enforcement techniques today, these methods do neither need an unphysical, user-defined parameter (e.g. penalty parameter) nor additional iterative schemes for the Lagrange multiplier update (e.g. Uzawa's method).
Furthermore, a part of the current work concerns the improvement of the nonlinear solver robustness. For this purpose an augmented mortar-type contact formulation combined with ideas of sequential quadratic programming methods is used. The new approach is, for example, applicable to large initial penetrations of the contacting bodies without the need for additional control methods such as line search and therefore allows larger time steps.
Finally, a special focus is also set on high performance computing and parallel scalability of the developed contact formulations, with efforts ranging from efficient search algorithms (including self contact) to dynamic load balancing strategies as well as state-of-the-art iterative solvers and preconditioners for contact problems.
Publications
Please find publications on this topic here.